

meta data for this page
Der kippende Besenstiel - Das Ersatzprotokoll der Gruppe 322
Dieser außergewöhnliche Versuch wurde von Kira Bode und Anton Gericke (Gruppennummer: 322) durchgeführt.
Die Wiki-Seite ist auf dem Stand vom 3. January 2021.
Vorüberlegungen
Die Kippbewegung hängt von einigen physikalischen Größen ab. Um diese Zusammenhänge zu verstehen beschäftigen wir uns hier mit einigen Vorüberlegungen zur Bewegung des Besenstiels anhand der in der Versuchsanleitung gestellten Fragen.
Beschreiben Sie die Kippbewegung mithilfe physikalischer Begriffe.
Solange sich ein Körper in seiner Gleichgewichtsposition nicht bewegt, spricht man von einem statischen Gleichgewicht. Wenn der Körper ungestört bleibt, ist die Summe aller auf ihn wirkenden Kräften und Drehmomente gleich null und somit erfährt dieser keine Translations- oder Rotationsbeschleunigung. Wenn der Stab bei einem Winkel von $\phi=0^\circ$ (in Betracht auf das Lot des Bodens) ruht, spricht man von einem labilen Gleichgewicht, da jede infenitesimale Veränderung eine Bewegung augrund eines vorhandenen Potentials hervorruft. Im Falle unseres Beispiels, eines kippenden Besenstiels, handelt es sich um das Potential der Gravitationskraft.
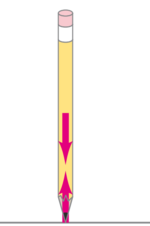 Fig. 1: Labiles Gleichgewicht eines Bleistifts [Gia09, S. 417]
Fig. 1: Labiles Gleichgewicht eines Bleistifts [Gia09, S. 417]
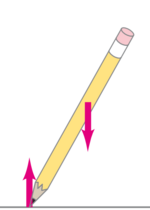 Fig. 2: Auslenkung aus der Gleichgewichtslage [Gia09, S. 417]
Fig. 2: Auslenkung aus der Gleichgewichtslage [Gia09, S. 417]
Wenn sich der Schwerpunkt des Gegenstands in seiner Grundfläche befindet spricht man somit von einem labilen Gleichgewicht. In diesem Zustand wird die Gewichtskraft des Stiftes durch die gleich große, aber entgegengestzte Normalkraft des Tisches ausgeglichen. Sobald der Gegenstand jedoch etwas aus seiner Ruhelage ausgelenkt wird, befindet sich sein Schwerpunkt nicht mehr im Bereich der Grundfläche und somit bewirkt die Gewichtskraft einen Drehmoment auf das jeweilige Objekt. Somit gelangen wir zur Definition eines Drehmomentes:
\begin{align} \Vec{M}=\Vec{r}\times \Vec{F}=r\cdot F \cdot sin(\alpha)=\frac{d\Vec{L}}{dt}=I\cdot \alpha \label{eq:Drehmoment} \end{align}
Im labilen Gleichgewicht ist das Drehmoment $\Vec{M}=\Vec{r}\times \Vec{F}=0$ da $\Vec{r}\parallel \Vec{F}$, da es sich hier um eine Rotationsbewegung handelt, gilt die allgemeine Bewegungsgleichung: \begin{align} \varphi=\varphi_{0}+\omega\cdot t+\frac{1}{2}\,\alpha\cdot t^2 \label{eq:bewegungsgleichung} \end{align}
Vernachlässigt man die Luftreibung, so hängt bei gleicher Stablänge die Kippzeit T nicht von der Stabmasse m ab.
Zum Verständnis dieser Aussage wird das, in der Regel bekannte, Experiment zum freien Fall einer Feder und eines Steines mit unterschiedlichen Massen betrachtet. Werden Feder und Stein im Umgebungsmedium Luft gleichzeitig fallen gelassen, trifft der Stein vor der Feder auf den Boden auf. Wird dieses Experiment jedoch im Vakuum, d.h. ohne Luftreibung durchgeführt, kann ein gleichzeitiges Auftreffen des Steines und der Feder beobachtet werden. Dieses lässt darauf schließen, dass im freien Fall diese Masse für die Fallzeit nicht relvant ist, wenn die Luftreibung vernachlässigt werden kann. Dieses Ergebnis kann auf den in der Aussage betrachteten Versuch übertragen werden, da durch andere, die Kippzeit betreffende Variablen, wie das durch die Stablänge variierende Moment nicht verändert werden.
Alltägliche Erfahrung: Je kleiner der Anfangswinkel ist, desto größer ist die Kippzeit T.
Wenn wir die Beweungsgleichung betrachten und Annehmen, dass wir das Objekt ohne Anfangsgeschwindigkeit fallen lassen ergibt sich folgende Gleichung: \begin{align} \varphi&=\varphi_{0}+\frac{1}{2}\,\alpha\cdot t^2\\ T&=t= \sqrt{\frac{2 (\varphi-\varphi_{0})}{\alpha}} \label{eq:kippzeit} \end{align}
Anhand der Gleichung zur Kippzeit sehen wir: Je kleiner der Anfangswinkel $\varphi_{0}$, desto länger die Kippzeit T und somit bestätigt sich unsere alltägliche Erfahrung.
Welchen Einfluss hat die Stablänge?
Als erstes Betrachten wir den Kippprozess per Energieerhaltung: Vorm Fallenlassen besitzt der Stab ausschließlich Potentielle Energie (wobei die Höhe des Mittelpunkts/ Schwepunkts zur Berechnung genommen wird) und beim Aufprall nur noch Kinetische bzw Rotationsenergie:
\begin{align} E_{Pot}&=E_{Kin} \label{eq:energieerhaltunggrob}\\ m\,g\,\frac{L}{2}\,cos(\alpha)&=\frac{1}{2}\,I_{neu}\,\omega^2 \label{eq:energieerhaltung} \end{align} Nun bestimmen wir das Trägheitsmoment $I_{neu}$ per Satz von Steiner, wobei $I_{s}=\frac{1}{12}\,m\,L^2$ das Trägheitsmoment für einen Stab ist. \begin{align} I_{neu}&=I_{s}+m\,d^2\\ I_{neu}&=\frac{1}{12}\,m\,L^2+\frac{3}{12}\,m\,L^2=\frac{1}{3}\,m\,L^2 \end{align} Setzen wir dies nun in Gleichung der Energieerhaltung ein erhalten wir: \begin{align} m\,g\,\frac{L}{2}\,cos(\alpha)&=\frac{1}{2}\,(\frac{1}{3}\,m\,L^2)\,\omega^2\\ \omega&=\sqrt{\frac{3\,g\,cos(\alpha)}{L}} \label{winkelgeschwindigkeit} \end{align}
Wenn wir nun die Winkelgeschwindigkeit betrachten, erkennen wir, dass $w \sim \frac{1}{\sqrt{L}}$ ist. Je größer die Länge des Stabs, desto geringer seine Winkelgeschwindigkeit beim Aufprall auf den Boden. Wenn die Winkelgeschwindigkeit am Ende geringer ist, muss folglich der Stab auch langsamer fallen. Somit erhöht sich auch die Fallzeit in Abhängigkeit der Stablänge.
Welche Schlussfolgerungen ergeben sich aus diesen Experimenten für das Jonglieren? Wie sollte der Stab beschaffen sein, damit das Jonglierenmöglichst leicht gelingt?
Es sollte sich um einen langen Stab handeln, da sich bei diesem der Massenschwerpunkt ändert und somit die effektive Länge verlängert wird. Dies ergibt folglich eine langsamere Winkelgeschwindigkeit und in diesem Zusammenhang eine höhere Fallzeit (siehe vorherige Formeln). Somit ist mehr Zeit für Korrekturen des Stabes möglich. In diesem Versuch haben wir größtenteils die Luftreibung vernachlässigt, jedoch besitzt ein leichter Stab weniger Gewicht bei gleicher Oberfläche und erfährt somit mehr Luftreibung, welche seine Winkelgeschwindigkeit verringert.
Experimentelle Betrachtung der Kippzeit (Messungen)
Versuchsaufbau
 Fig. 3: Realer Versuchsaufbau im Freien (Besenlänge von 120 cm)
Fig. 3: Realer Versuchsaufbau im Freien (Besenlänge von 120 cm)
Aufbau:
- Anbringen einer horinzontal ausgerichteten Wasserwaage bei verschiedenen Höhen $h_{Waage}$
- Einstellen des Anfangswinkels über diese Höhe (Nutzung trigonometrischer Funktionen)
\begin{align}\phi_0=\arccos(\frac{h_{Waage}}{l_{Besen}})\end{align}
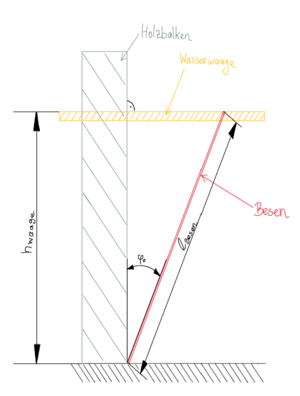 Fig. 4: Skizzierter Versuchsaufbau zur Erklärung der Anfangsauslenkung
Fig. 4: Skizzierter Versuchsaufbau zur Erklärung der Anfangsauslenkung
- Ansetzen der Schaumstofffläche des Haushaltsbesens anhand einer gleichbleibenden Linie auf dem Boden in allen Versuchsdurchgängen
- Anheben des Stabendes auf Höhe der Wasserwaage und manuelles fallenlassen
Art der Zeitmessung:
- Messung der Zeit mit der akustischen Stoppuhr von Phyphox
- Geben eines manuellen akustischen Signals durch die durchführende Person zum Start der Messung bei gleichzeitigem Fallenlassen des Stabes (Einfluss der Reaktionszeit beachten!)
- Stoppen der Zeitmessung durch das akustische Signal beim Auftreffen des Besenstiels auf dem Boden ($\phi=\frac{\pi}{2}$)
- Positionierung des Smartphone mittig zwischen den akustischen Signalen (Einfluss der Schallgeschwindigkeit vermindern)
Variationen:
- Änderung von…



Systematische Unsicherheit der Zeitmessung
M1:Bestimmung der Schrecksekunde
Zur Berücksichtigung der Reaktionszeit der durchführenden Person beim Fallenlassen des Stabes und Geben des akustischen Signals zum Starten der akustischen Stoppuhr, stoppt diese Person die “normale” Stoppuhr des Smartphones möglichst genau auf 5 Sekunden.
Es ergaben sich folgende Messdaten:
| Durchgang | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Zeit [s] | 5,15 | 5,16 | 4,97 | 5,01 | 4,92 | 5,09 | 5,18 | 5,01 | 4,92 | 5,01 |
| Abweichung $\Delta t_i$ [s] | 0,15 | 0,16 | 0,03 | 0,01 | 0,08 | 0,09 | 0,18 | 0,01 | 0,08 | 0,01 |
Einfluss der Luftreibung
M2:Variation der Masse
| Massen | Längen | |
|---|---|---|
| \begin{align}m_{Papierrolle}=(189\pm 1)g \end{align} | \begin{align}l_{Besen}=(120\pm 0,5)cm \end{align} | |
| \begin{align}m_{Rohr+Papierrolle}=(496\pm 1)g\end{align} | \begin{align}h_{Waage}=(110\pm 0,5)cm \end{align} | |
| Durchgang | Kippzeit t in s | |
|---|---|---|
| mit Papierrolle | mit Rohr und Papierrolle | |
| 1 | 0,58 | 0,623 |
| 2 | 0,624 | 0,649 |
| 3 | 0,61 | 0,656 |
| 4 | 0,607 | 0,684 |
| 5 | 0,604 | 0,63 |
M3:Variation der Oberfläche
| Massen | Längen | |
|---|---|---|
| \begin{align}m_{Rohr+Papierrolle}=(496\pm 1)g \end{align} | \begin{align}l_{Besen}=(120\pm 0,5)cm \end{align} | |
| \begin{align}m_{T-Papier}=(503\pm 1)g\end{align} | \begin{align}h_{Waage}=(110\pm 0,5)cm \end{align} | |
| Durchgang | Kippzeit t in s | |
|---|---|---|
| mit Rohr und Papierrolle | mit 4 Rollen Toilettenpapier | |
| 1 | 0,623 | 0,645 |
| 2 | 0,649 | 0,658 |
| 3 | 0,656 | 0,644 |
| 4 | 0,684 | 0,641 |
| 5 | 0,63 | 0,652 |
Kippzeit bei Variation der Besenlängen
M4: Besenlänge von 120 cm
| Masse | Länge | |
|---|---|---|
| \begin{align}m_{Besen}=(489\pm 1)g \end{align} | \begin{align}l_{Besen}=(120\pm 0,5)cm \end{align} | |
| Kippzeit $t_i$ im Durchgang i | |||||
|---|---|---|---|---|---|
| $h_{Waage}$ | $t_1$ [s] | $t_2$ [s] | $t_3$ [s] | $t_4$ [s] | $t_5$ [s] |
| 120 | 1,321 | 1,396 | 1,42 | 1,303 | 1,245 |
| 119 | 0,856 | 0,888 | 0,811 | 0,809 | 0,75 |
| 118 | 0,7 | 0,757 | 0,723 | 0,623 | 0,664 |
| 116 | 0,631 | 0,583 | 0,692 | 0,706 | 0,633 |
| 113 | 0,577 | 0,585 | 0,531 | 0,59 | 0,528 |
| 109 | 0,521 | 0,546 | 0,501 | 0,513 | 0,535 |
| 104 | 0,513 | 0,489 | 0,515 | 0,533 | 0,516 |
| 98 | 0,471 | 0,433 | 0,545 | 0,481 | 0,462 |
| 92 | 0,394 | 0,414 | 0,433 | 0,384 | 0,41 |
M5: Besenlänge von 150 cm
| Masse | Länge | |
|---|---|---|
| \begin{align}m_{Besen}=(489\pm 1)g \end{align} | \begin{align}l_{Besen}=(150\pm 0,5)cm \end{align} | |
| Kippzeit $t_i$ im Durchgang i | |||||
|---|---|---|---|---|---|
| $h_{Waage}$ | $t_1$ [s] | $t_2$ [s] | $t_3$ [s] | $t_4$ [s] | $t_5$ [s] |
| 150 | 1,642 | 1,8 | 1,818 | 1,765 | 1,74 |
| 149 | 0,849 | 0,857 | 0,854 | 0,905 | 0,859 |
| 147 | 0,809 | 0,818 | 0,765 | 0,776 | 0,784 |
| 145 | 0,77 | 0,78 | 0,726 | 0,754 | 0,759 |
| 141 | 0,684 | 0,694 | 0,706 | 0,734 | 0,727 |
| 136 | 0,643 | 0,636 | 0,66 | 0,647 | 0,664 |
| 130 | 0,605 | 0,638 | 0,642 | 0,598 | 0,656 |
| 123 | 0,562 | 0,552 | 0,554 | 0,523 | 0,599 |
| 115 | 0,501 | 0,512 | 0,525 | 0,507 | 0,515 |
Theoretische Betrachtung mit dem Zeitschrittverfahren (Programm)
- Zeitschrittverfahren
import numpy as np import matplotlib.pyplot as plt def phi(t,deltat,l,g,startwinkel): '''Als erstes definieren wir die Konstante Tau und erstellen ein array, in welchem wir unsere numerischen Werte speichern. Hierbei beschreibt len(t) die Anzahl der Elemente im jeweiligen Array''' tau = np.sqrt(2*l/(3*g)) phiarray = np.zeros(len(t)) '''Nun der erste Schritt für das Zeitschrittverfahren. Die Winkelbeschl. ist durch die jeweilige Funktion im Skript gegeben. Hierbei gehen wir von einer Anfangswinkelgeschw.=0.''' winkelbeschleunigung = np.sin(startwinkel)/tau**2 winkelgeschwindigkeit = 0 phi = startwinkel phiarray[0] = np.pi/2 - phi '''Nun definieren wir eine Schleife, welche die jeweiligen Werte berechnet und eine Termination der Schleife bewirkt, wenn der Winkel über pi/2 (90Grad) fällt. Die jeweilige Prozedur übernehmen wir schlichtweg aus dem Skript.''' for i in range(len(t)-1): winkelgeschwindigkeit = winkelgeschwindigkeit + deltat*winkelbeschleunigung phi = phi + deltat*winkelgeschwindigkeit winkelbeschleunigung = np.sin(phi)/tau**2 phiarray[i+1] = np.pi/2 - phi if(phi > np.pi/2): phiarray[i+1] = 0 return phiarray ''' Danach definieren wir einen Endzeitpunkt, welcher eintritt, sobald im Array das erste Element mit einer 0 gefunden wird. Falls die der Endzeitpunkt nicht im Intervall bis tmax liegt, erhält man die Fehlermeldung -1000.''' def t_Aufprall(t,phi): for i in range(len(t)): if(phi[i] == 0): return(t[i]) return(-1000) def main(): '''Definieren der Konstanten und des Zeitschrittverfahrens: Der startwinkel wird in rad angegeben, somit ist die Umrechnung Pi/360Grad notwendig. Delta(t) gibt die Zeitschritte an, in welchen die Prozedur vollzogen werden soll. Je kleiner die Zeitschritt, desto genauer auch das Ergebnis''' l = 1.45 startwinkel = 0.25 tmin = 0 tmax = 1.2 deltat = 0.00001 g = 9.81 t = np.linspace(tmin,tmax,int((tmax - tmin)/deltat)) plt.plot(t,phi(t,deltat,l,g,startwinkel)) plt.ylabel('Fallwinkel [rad]') plt.xlabel('t [s]') plt.grid(True) plt.show() print('t_Aufprall =',t_Aufprall(t,phi(t,deltat,l,g,startwinkel)),'s') if __name__=="__main__": main()
Literatur
| [Gia09] | Douglas C. Giancoli.Physik: Lehr- un Übungsbuch. 3., erw. Aufl. Pearson Studium - Physik. München: Pearson Deutschland und Pearson Studium, 2009.ISBN:978386894023 |