

meta data for this page
This is an old revision of the document!
Syntax und Funktionen im Wiki
Hier noch Links zu
Fußnotentest 1)
Auswertung Gruppe 310 - Besenstiel
Der Versuch wurde durchgeführt von: Erin Feldkemper und Arthur Wohlfahrt
Die Wiki-Seite wurde angelegt am: @DATE@
In diesem Wiki soll die Durchführung des Besenstiel-Versuches im HomeLab dokumentiert werden
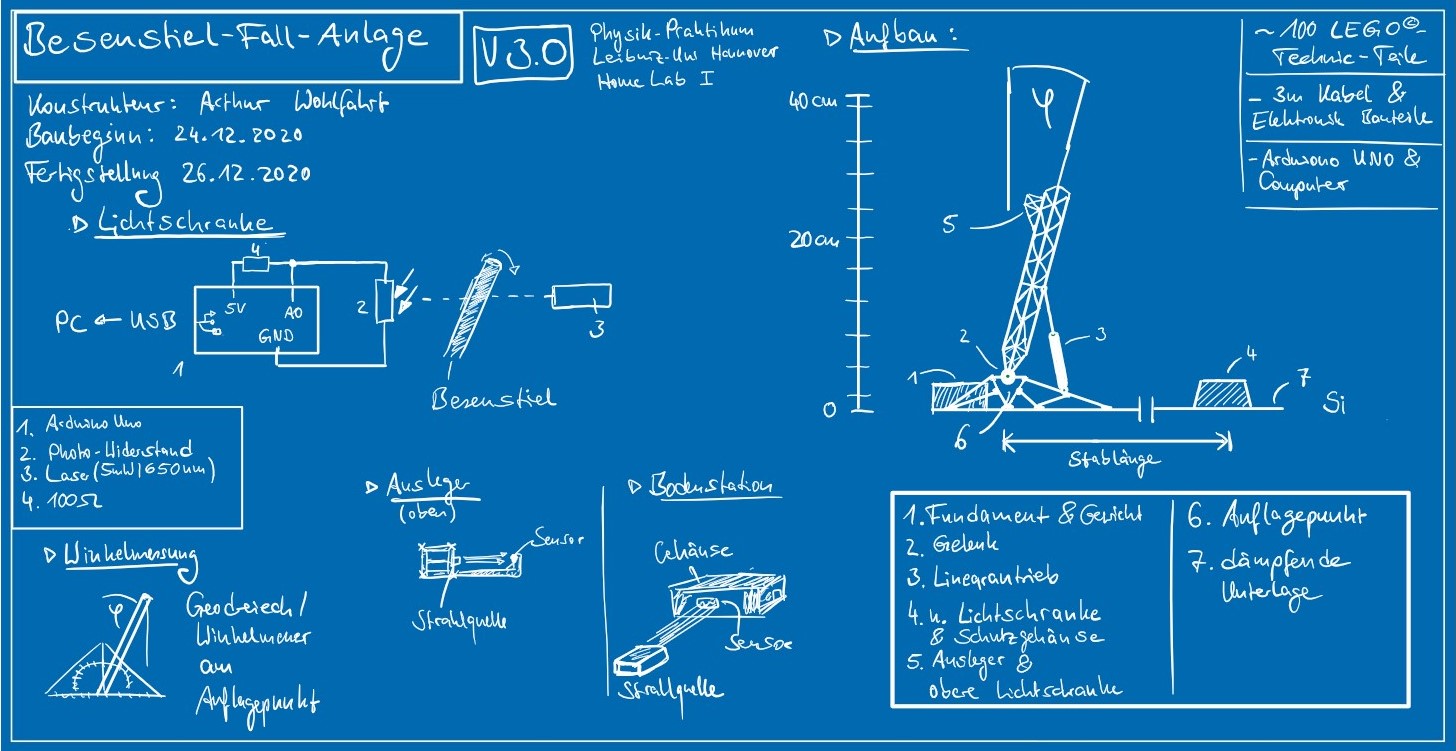
Aufbau 1
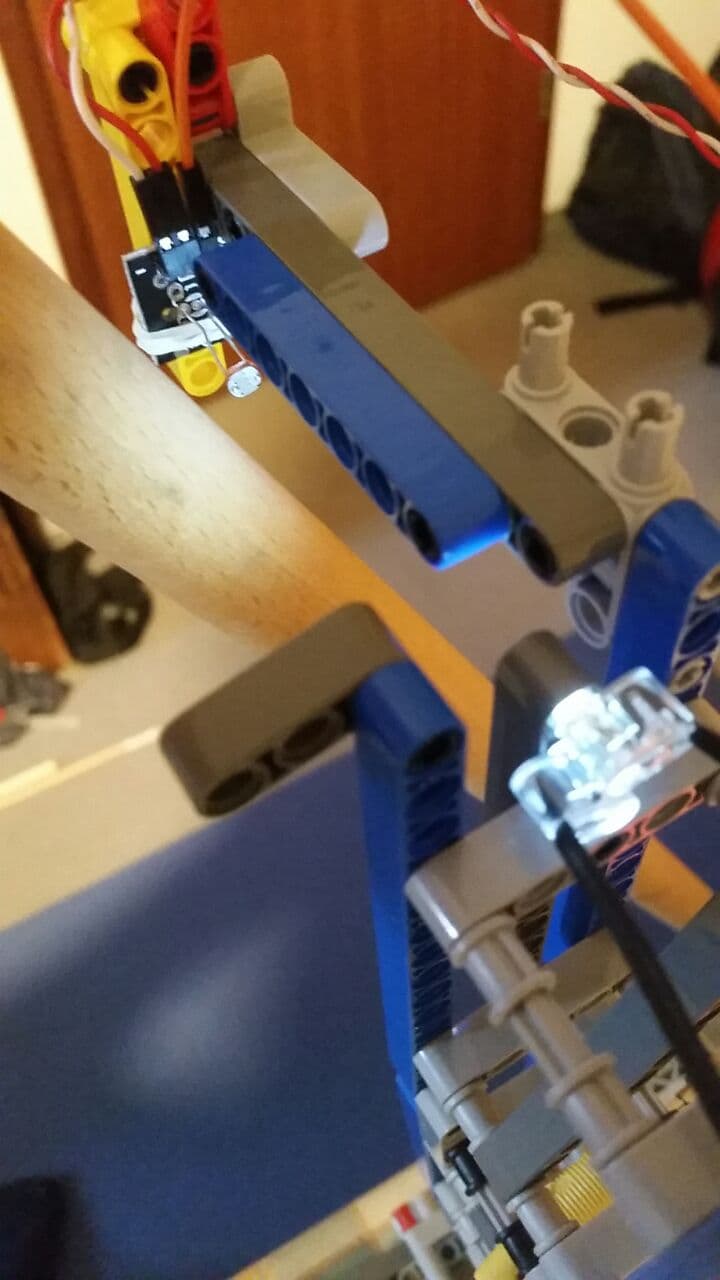
Zur Messung der Fallzeit haben wir uns für eine Lichtschranke entschieden. An einem Ausleger und einer Bodenstation wird so die Fallzeit des Besens gemessen.
Aufbau schematisch
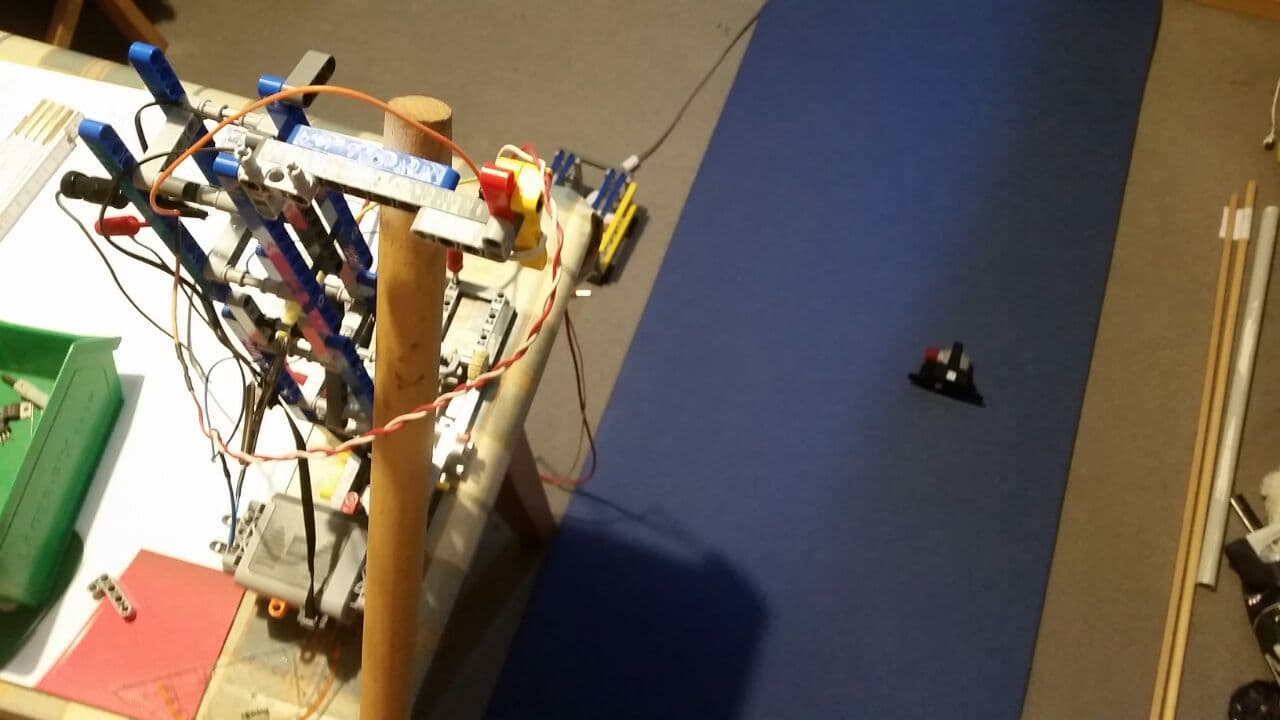
Aufbau für kleine Längen
Aufbau für große Längen
Lichtschranke
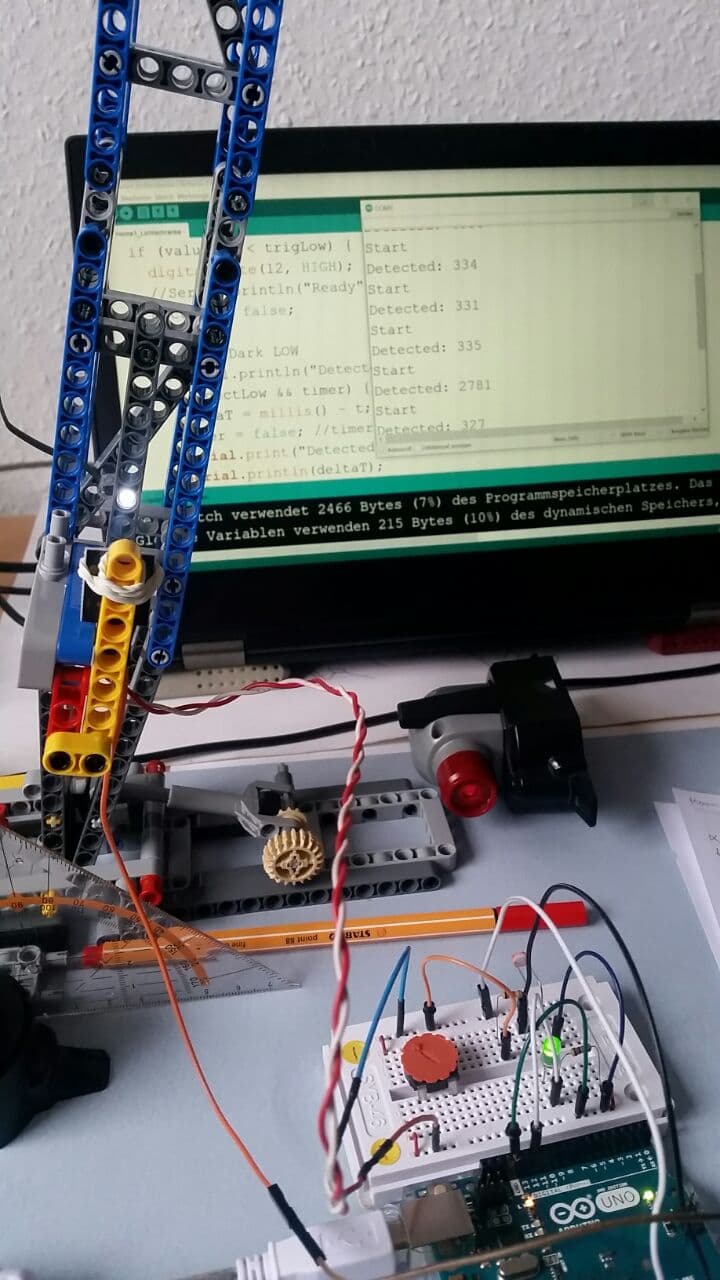
Schaltung
Computerprogramm
Das Zeitschrittverfahren oder auch Euler-Verfahren zur numerischen Berechnung der Fallzeit wurde mit Python realisiert. Code (samt Kommentaren) und resultierende Plots sind eingefügt.
Die verwendete Lichtschranke wurde mit dem Microcontroller-Board Arduino Uno realisiert. Der Programmcode dazu befindet sich am Ende dieses Abschnittes.
Zunächst zur allg. Berechnung des Winkels in Abhgkt. zur Zeit
- ExplizitesEulerVerfahren.py
- import numpy as np
- import matplotlib.pyplot as plt
- import math
- #Variablen und Konstanten
- tmax=2
- dt=0.01 #10 ms
- g=9.81
- l=1.45 # m
- tau=math.sqrt(2*l/(3*g))
- vPhi0=0 #zero initial phi-velocity
- phi0=0.25
- t=[]
- phi=[]
- vPhi=[]
- # initial values
- phi.append(phi0)
- vPhi.append(vPhi0)
- i=0
- #Explizites Euler Verfahren/ Iteration
- while True:
- vPhi.append(vPhi[i] +dt*math.sin(phi[i])/(tau**2))
- phi.append(phi[i]+dt*vPhi[i])
- i+=1
- if phi[i] >= math.pi/2:
- break
- # Berechnung Auftreffzeitpunkt
- tmax=len(phi)*dt
- print(tmax)
- #erzeuge Zeiten
- t=np.arange(0,tmax,dt)
- # Erzeuge eine Figure.
- fig = plt.figure(figsize=(9, 4))
- fig.set_tight_layout(True)
- # Plotte das Winkel-Zeit-Diagramm.
- ax1 = fig.add_subplot(1, 1, 1)
- ax1.set_xlabel("t [s]")
- ax1.set_ylabel("phi [rad]")
- ax1.grid()
- #ax1.plot(t, vPhi, ".b", label="Vphi")
- ax1.plot(t, phi, ".r", label="Phi")
- ax1.legend()
- plt.show()
- StartwinkelFallzeit.py
- import numpy as np
- import matplotlib.pyplot as plt
- import math
- #variables and constants
- tmax=2
- dt=0.01 #stepsize
- g=9.81
- l=1.45 # m
- tau=math.sqrt(2*l/(3*g))
- vPhi0=0 #zero initial phi-velocity
- #method to solve the diff-eq.
- def solver2(phi0,stepT):
- t=[] #generate lists
- phi=[]
- vPhi=[]
- # initial values
- phi.append(phi0)
- vPhi.append(vPhi0)
- i=0
- while True: #iterations according to Euler
- vPhi.append(vPhi[i] +stepT*math.sin(phi[i])/(tau**2))
- phi.append(phi[i]+stepT*vPhi[i])
- i+=1 #next step
- if phi[i] >= math.pi/2: # stick has reached ground at 90°
- break
- tmax=len(phi)*stepT #calculate elapsed time
- t=np.arange(0,tmax,stepT)
- return (tmax,t,phi) #return tupel with fall-time + time and angle arrays
- #initial angles
- initPhi=np.arange(0.25,1.3,0.05)
- def calcTs(step): #calc the fall time for different initial phi
- ts=[]
- for i in initPhi: #generate list of times
- ts.append(solver2(i,step)[0]) #first element in return tuple is tmax
- return ts
- steps=np.array([0.1,0.05,0.01,0.001])
- times=[]
- for m in steps:
- times.append(calcTs(m))
- # Erzeuge eine Figure.
- fig = plt.figure(figsize=(7, 5))
- fig.set_tight_layout(True)
- # Plotte das Diagramm.
- ax1 = fig.add_subplot(1, 1, 1)
- ax1.set_xlabel("phi0 [rad]")
- ax1.set_ylabel("T [s]")
- ax1.grid()
- ax1.plot(initPhi, times[0], ".b", label=f"dt={steps[0]}")
- ax1.plot(initPhi, times[1], ".r", label=f"dt={steps[1]}")
- ax1.plot(initPhi, times[2], ".g", label=f"dt={steps[2]}")
- ax1.plot(initPhi, times[3], "xm", label=f"dt={steps[3]}")
- ax1.legend()
- #anzeigen
- plt.show()
Arduino Code
- Lichtschranke.ino
- /*
- Control two light barriers, connected to pin A0 and A2 (arduino UNO)
- Indicator leds are connected to pin 12 and 13.
- Measure time in ms between to detections of the upper/lower light barrier.
- 27.12.2020
- */
- boolean dectUp = false;
- boolean dectLow = false;
- boolean timer = false; //timer running?
- int trigUp = 700;
- int trigLow = 950;
- unsigned long deltaT = 0;
- unsigned long t = 0;
- unsigned long deltaTU = 0;
- unsigned long tU = 0;
- void setup() {
- // initialize serial communication at 9600 bits per second:
- Serial.begin(9600);
- pinMode(12, OUTPUT); //indicator low
- pinMode(13, OUTPUT); //indicator high
- }
- void loop() {
- // read the input on analog pin 0:
- int valueLow = analogRead(A0);
- int valueUp = analogRead(A2);
- // print out the value you read:
- /*Serial.print(valueLow);
- Serial.print(" | oben: ")
- Serial.println(valueUp);
- */
- //delay(100); // delay in between reads for stability
- if (valueUp < trigUp) { // upper sensor
- //Serial.println("Ready");
- if (dectUp && timer == false) { //first light after dark and timer not running
- Serial.println("Rest");
- Serial.println(millis() - t);
- t = millis(); //start timer
- timer = true; //timer on
- Serial.println("Start");
- }
- digitalWrite(13, HIGH);
- dectUp = false;
- }
- else { // Dark UP
- //Serial.println("Detected");
- digitalWrite(13, LOW);
- delay(5); // detection break
- dectUp = true;
- timer = false; //timer off
- }
- //Serial.print("time-complexity: ");
- //Serial.println(millis()-tU);
- //tU = millis();
- if (valueLow < trigLow) { //lower sensor
- digitalWrite(12, HIGH);
- //Serial.println("Ready");
- dectLow = false;
- }
- else { // Dark LOW
- //Serial.println("Detected");
- if (!dectLow && timer) { //first dark after light
- deltaT = millis() - t;
- timer = false; //timer off
- Serial.print("Detected: ");
- Serial.println(deltaT);
- }
- digitalWrite(12, LOW);
- //delay(1); // detection break
- dectLow = true;
- }
- }
Computerprogramm
Vorgehen - Messung 2
Um die Fallzeit des Besenstiels mit der Länge l=1.2(m) zu bestimmen, wurden auf dem Boden eine Markierung neben den Schreibtisch gemacht um den Besenstiel immer vom gleichen Ort fallen lasse zu können. Auf dem Schreibtisch wurden 5 verschiedene Markierungen geklebt um verschiedene Winkel messen zu können (siehe Foto). Anschließend wurden mithilfe der App “iLevel” die Winkel bestimmt und pro Winkel werden nun jeweils 5 Fallzeiten manuell aufgenommen (siehe Tabelle).

| 98.0° | 115.4° | 127.3° | 136.8° | 143.4° | |
| 1. | 0.93 | 0.69 | 0.91 | 0.65 | 0.64 |
| 2. | 1.07 | 0.64 | 0.65 | 0.83 | 0.46 |
| 3. | 0.97 | 0.79 | 0.56 | 0.75 | 0.37 |
| 4. | 0.99 | 0.7 | 0.63 | 0.48 | 0.49 |
| 5. | 1.09 | 0.76 | 0.74 | 0.53 | 0.49 |
Wir haben uns jedoch dazu entschlossen in unserer Auswertung nur die Messwerte der ersten Messung zu werden um gleiche Fehlerabschätzungen zu haben, und bessere Aussagen treffen zu können.