

meta data for this page
This is an old revision of the document!
Gruppe 314 - Drehschwingungen
Eine Web-Site gestaltet von Zoe Lohmann und Lisa Digiacomo zur Protokollierung des Versuchs 'Drehschwingungen'.
Theoretische Grundlagen
Bevor das eigentliche Experimentieren losgeht, sollte man sich die theoretischen Grundlagen anschauen, um die Ergebnisse interpretieren zu können. Dazu werden Fragen und Aufgaben bearbeitet.
Allgemeiner Versuchsaufbau
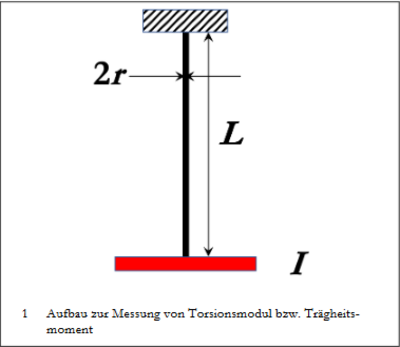
(Quelle: Aufgabenstellung Drehschwingung ©2020 R. Scholz, K.-M.Knaak und K.Weber, LUH)
Wird ein Draht mit einem anhängenden Körper um dem Winkel $\varphi$ aus seiner Ruhelage gelenkt, so wirkt ein rücktreibendes Drehmoment $D = - D_{R} \cdot \varphi $ mit $D_{R}$ einer Winkelrichtgröße abhängig von Material und dessen Abmessungen.
Die Bewegungsgleichung $I \cdot \frac{d^2 \varphi}{d t ^2} = -D _{R}\cdot \varphi$ für diesen Aufbau hat die Lösung $\varphi (t) = \varphi_{0} \cdot \cos{(\omega t)}$ mit $\omega = \sqrt{\frac{D_{R}}{I}}$ ($\omega$ der Kreisfrequenz der Bewegung).
Berechnung der Schwingungsdauer T
Nun soll aus der Kreisfrequenz $\omega$ die Schwingungsdauer T bestimmt werden. Dazu hilft die Beziehung $\omega = \frac{2 \pi}{T}$. Diese kann man der Kreisfrequenz aus der Lösung der Bewegungsgleichung gleichgesetzt werden und wir erhalten:
$\sqrt{\frac{D_{R}}{I}} = \frac {2\pi}{T} \leftrightarrow T = 2\pi \cdot \frac{I}{D_{R}}$
Berechnungen vom rücktreibenden Drehmoment $D $
Das rücktreibende Drehmoment ist stark von dem Radius des verwendetenen Materials.
Mit Hilfe der Formel $ D_{R} = \frac{\pi }{ 2} \cdot \frac{G \cdot R^4}{L}$ mit G dem Torsionsmoduls des Materials, R dem Radius und L der Länge des Drahtes.
Als Beispiel wurde ein Kupferdraht verwendet. Dieser hat ein Torsionsmodul von $G = 47~ GPa = 47^{9}~ Pa$. Die Länge wurde auf $L = 20 ~cm$ gesetzt. Für verschiedene Drahtradien $R_{i}$ wurden folgende rücktreibende Drehmomente $D = - D_{R} \cdot \varphi $ für einen konstanten Winkel von $\varphi = 0,25 ~rad$ berechnet:
$R_{1} = 2 ~mm$: $D_{R_{1}} = \frac{\pi \cdot 47^{9}~Pa \cdot (0,02~m)^{4}}{2\cdot 0,2 m}= 59061,94 ~ \frac{Nm}{rad} \leftrightarrow D= -14765,49 ~Nm$
$R_{2} = 3 ~mm$: $D_{R_{1}} = \frac{\pi \cdot 47^{9}~Pa \cdot (0,03~m)^{4}}{2\cdot 0,2 m}= 299001,08 ~ \frac{Nm}{rad}\leftrightarrow D= -74750,27 ~Nm$
$R_{3} = 2,5~ mm$: $D_{R_{1}} = \frac{\pi \cdot 47^{9}~Pa \cdot (0,025~m)^{4}}{2\cdot 0,2 m}= 144194,19 ~ \frac{Nm}{rad}\leftrightarrow D= -36048,55 ~Nm$
$R_{4} = 2,1 ~mm$: $D_{R_{1}} = \frac{\pi \cdot 47^{9}~Pa \cdot (0,021~m)^{4}}{2\cdot 0,2 m}= 71790,16 ~ \frac{Nm}{rad}\leftrightarrow D= -17947,54 ~Nm$
Man kann erkennen, das eine kleine Änderung von $\Delta R = 0,1 ~ mm$ ausreicht, dass sich $D$ betragsmäßig um knapp $22 \% $ erhöht.
Anfangsbedingungen zur Bestimmung der Lösung der Bewegungsgleichung
Um die Lösung der Bewegungsgleichung zu erhalten, müssen Anfangsbedinungen gestellt werden. Diese lauten :
$\varphi (0) = \varphi_{0}$, $\frac{d \varphi}{dt} = 0$ und $\frac{d ^2\varphi}{dt^2} = -\varphi_{0} \cdot \frac{D_{R}}{I}$.
Um diese zu beweisen, werden diese in die Lösung eingesetzt:
$\varphi (0) = \varphi_{0} \cdot \cos{(\omega \cdot0)}= \varphi_{0} \cdot 1 = \varphi_{0}$
Die erste Bedinung ist erfüllt.
Für die weiteren müssen die Ableitungen der Lösung gebildet werden:
$\frac{d \varphi(t)}{dt}= - \varphi_{0} \cdot \omega \cdot \sin{(\omega t)}$
$\frac{d^2 \varphi(t)}{dt^2}= - \varphi_{0} \cdot \omega^2 \cdot \cos{(\omega t)}$
Jetzt kann man die Ableitungen zur Zeit $t=0$ berechenen:
$\frac{d \varphi(0)}{dt}= - \varphi_{0} \cdot \omega \cdot \sin{(\omega \cdot 0)}= 0$
$\frac{d^2 \varphi(0)}{dt^2}= - \varphi_{0} \cdot \omega^2 \cdot \cos{(\omega \cdot 0)}= -\varphi_{0}\cdot \omega ^2=-\varphi_{0}\cdot\frac{D_{R}}{I}$
Damit sind auch diese Bedingen erfüllt.
Einheiten wichtiger Größen
Gefragt wird, welche Einheiten jeweils $D$, $D_{R}$, $I$ und $\varphi$ haben.
Die Winkelrichtgröße $D_{R}$ hat die Einheit $[\frac{Nm}{rad}]$. Sie ist eine Propotionalitätskonstante zwischen Drehmoment und Drehwinkel.
Das Drehmoment $D$ hat die Einheit $[Nm]$. Es ist das Produkt aus Armlänge $r$ und an dieser angreifenden Kraft $F$.
Das Trägheitsmoment $I$ hat die Einheit $[kgm^2]$. Es ist das Produkt aus Masse $m$ des Körpers und dem Quadrat des Radius $r$ zur Drehachse.
Der Winkel $\varphi$ hat die Einheit $[rad]$. Radiant ist ein Winkelmaß, das den entsprechenden Winkel als Länge im Einheitskreis angibt.
Beweis von $\omega$
Für den Beweis von $\omega$ soll die Gleichung $\varphi (t) = \varphi_{0} \cdot \cos{(\omega t)}$ und deren zweite Ableitung in $I \cdot \frac{d^2 \varphi}{d t ^2} = -D _{R}\cdot \varphi$ eingesetzt werden:
$-I \cdot \varphi_{0} \cdot \omega^2 \cdot \cos{(\omega t)} = -D _{R}\cdot \varphi_{0} \cdot \cos{(\omega t)}~~~~~~$| : $\varphi_{0}$
$-I \cdot \omega^2 \cdot \cos{(\omega t)} = -D _{R} \cdot \cos{(\omega t)}~~~~~~$| $+D _{R} \cdot \cos{(\omega t)}$
$-I \cdot \omega^2 +D _{R} \cdot (\cdot \cos{(\omega t)}) = 0~~~~~~$
Damit für variable $t$ diese Gleichung erfüllt ist, muss $-I \cdot \omega^2 +D _{R}$ Null sein.
$-I \cdot \omega^2 +D _{R}= 0~~~~~~$|$-D_{R} ~ $| : $- I$
$\omega^2 = \frac {D_{R}}{I}~~~~~~$|√
$\Rightarrow \omega = \sqrt{\frac{D_{R}}{I}}$
Experimentelle Bestimmung des Drehmoments
Joa keine ahnung. evtl trägheitsmoment und damit dann drhemoment berechnen????
Rotationsenergie
Arbeit ist bei Translation das Produkt aus Kraft und Weg. In der Rotation ist das Drehmoment und der Drehwinkel das Äquivalent zu Kraft und Weg. Das bedeutet, dass die Änderung der Arbeit durch das Produkt aus Drehmoment und der Änderung des Winkels ausgedrückt werden kann. In der Translation wäre die Änderung der Arbeit das Produkt aus Arbeit und Änderung des Ortes.
$dW = D \cdot d\varphi$.
Welche Änderung an Rotationsenergie entspricht dem?
Steiner'sche Satz
Der Steiner'sche Satz besagt, dass wenn ein Körper der Masse $m$ um eine Achse rotiert, die im Abstand $h$ parallel zur Schwerpunktsachse des Körpers verläuft, so muss zum jeweiligen Wert des Trägheitsmoments der Term $m\cdot h^2$ addiert werden. Es folgt:
$I = I_{s} + m\cdot h^2$.
Welche physikalische Aussage benötigen Sie zu seinem Beweis?
Torsionsmodul des Drahtes
Versuchsaufbau
Im Folgeden Bild ist der Versuchsaufbau gezeigt:

Es wurde eine Plastikrolle verwendet, die an einem Stahldraht hängt. Der Stahldraht hängt an einer Lampe, damit sich die Rolle frei drehen kann.
Der Drehwinkel, bei dem die Rolle gedreht wurde, um damit die Schwingungsdauer zu bestimmen, wurde wie folgt bestimmt:
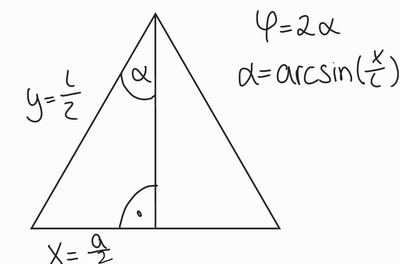
Die Auslenkung wurde für alle Messungen konstant bei $a= (4,00\pm 0,05)~cm$ gehalten. Die Länge der Rolle ist hier $l= ( 9,80 \pm 0,05)~cm$. Somit ergab sich ein Winkel $\varphi = 0,841~ rad $.
Fehler des Winkels
$u(\varphi) = \sqrt{(\frac{\partial \varphi}{\partial x}\cdot u(x))^2 + (\frac {\partial \varphi}{\partial y}\cdot u(y))^2}$
$u(\varphi) = \sqrt{(\frac{1}{y\cdot \sqrt{1-(\frac{x}{y})^2}}\cdot u(x))^2 + (-\frac {x}{y^2 \cdot sqrt{1-(\frac{x}{y})^2}}\cdot u(y))^2}$
$u(\varphi) = 0,0123~ rad$
Der Drehwinkel ist somit $\varphi = (0,841 \pm 0,123)~rad$.
Als anhängender Körper wurde eine Rolle benutzt. Dessen Maße sind :
Masse der Rolle $m = (30,0 \pm 0,5)~g$, Länge der Rolle $l=(9,80 \pm 0,05)~cm$ und Radius der Rolle $R = (4,80\pm 0,05)~cm$.
Mit
$I=\frac{1}{4}\cdot m\cdot R^2 + \frac{1}{12}\cdot m\cdot l^2$
kann dessen Trägheitsmoment berechnet werden : $ I = 0,0000413~ kgm^2$.
Mit Hilfe der Gaußschen Fehlerfortpflanzung:
$u(I)=\sqrt{2\cdot ((\frac{R^2}{4}+\frac{l^2}{12})\cdot u(m))^2 + (\frac {1}{2}\cdot m\cdot R \cdot u(R))^2+(\frac{1}{6}\cdot m\cdot l\cdot u(l))^2}$.
erhält man : $I = (4,13 \pm 0,11)\cdot 10 ^{-5} kgm^2$.
Messwerte Gitarrenseite
| L in m | $4~T$ in s | T in s | Standardabweichung in s | Standardfehler in s |
|---|---|---|---|---|
| 0,365 | 15,09 | 3,760 | 0,05 | 0,022 |
| 15,06 | ||||
| 14,99 | ||||
| 15,30 | ||||
| 14,75 | ||||
| 0,298 | 13,80 | 3,422 | 0,03 | 0,013 |
| 13,68 | ||||
| 13,49 | ||||
| 13,75 | ||||
| 13,72 | ||||
| 0,243 | 12,43 | 3,103 | 0,012 | |
| 12,28 | ||||
| 12,56 | ||||
| 12,33 | ||||
| 12,65 | ||||
| 0,158 | 10,09 | 2,508 | 0,02 | 0,009 |
| 9,91 | ||||
| 10,06 | ||||
| 10,10 | ||||
| 10,00 | ||||
| 0,089 | 7,74 | 1,958 | 0,017 | 0,007 |
| 7,86 | ||||
| 7,78 | ||||
| 7,89 | ||||
| 7,88 |
Messwerte Gummiband
| L in m | T in s | Mittelwert in s | Standardabweichung in s | Standardabweichung in s |
|---|---|---|---|---|
| 0,137 | 8,71 | 8,62 | 0,06 | 0,03 |
| 8,57 | ||||
| 8,56 | ||||
| 8,64 | ||||
| 8,63 | ||||
| 0,094 | 6,49 | 6,30 | 0,15 | 0,07 |
| 6,27 | ||||
| 6,11 | ||||
| 6,18 | ||||
| 6,20 | ||||
| 0,034 | 3,22 | 3,26 | 0,04 | 0,02 |
| 3,32 | ||||
| 3,24 | ||||
| 3,23 | ||||
| 3,27 |
Messwerte Kabel
| L in m | T in s | Mittelwert in s | Standardabweichung in s | Standardfehler in s |
|---|---|---|---|---|
| 0,964 | 0,550 | 0,558 | 0,014 | 0,006 |
| 0,580 | ||||
| 0,545 | ||||
| 0,553 | ||||
| 0,560 | ||||
| 0,588 | 0,483 | 0,474 | 0,012 | 0,005 |
| 0,480 | ||||
| 0,455 | ||||
| 0,470 | ||||
| 0,483 | ||||
| 0,221 | 0,283 | 0,290 | 0,009 | 0,004 |
| 0,280 | ||||
| 0,298 | ||||
| 0,300 | ||||
| 0,290 |
Messwerte Garn
| L in m | T in s | Mittelwert in s | Standardabweichung in s | Standardfehler in s |
|---|---|---|---|---|
| 0,756 | 9,97 | 9,75 | 0,3 | 0,13 |
| 9,72 | ||||
| 9,35 | ||||
| 9,93 | ||||
| 9,78 | ||||
| 0,532 | 7,31 | 7,40 | 0,09 | 0,04 |
| 7,44 | ||||
| 7,42 | ||||
| 7,51 | ||||
| 7,32 | ||||
| 0,108 | 3,740 | 3,76 | 0,04 | 0,018 |
| 3,805 | ||||
| 3,760 | ||||
| 3,695 | ||||
| 3,775 |
NOCH MIT FORMEL DR SCHWINGUNGSDAUER BERECHNEN????
Berechnung des Torsionsmoduls G
Zur Berechnung des Torsionsmoduls werden die Gleichungen $D_{R} = \frac{\pi}{2} \cdot \frac{G \cdot R^4}{L}$ und $ T= 2\cdot \pi \sqrt{\frac {I}{D_{R}}}$. Wenn wir die Gleichung für die Schwingungsdauer nach $D_{R}$ umstellen, können wir beides gleichsetzen und erhalten $ G = \frac{8\pi \cdot I \cdot L}{T^2 \cdot R^4}$